
株式会社ポケット・クエリーズ(本社:東京都新宿区 代表:佐々木宣彦、以下当社)は、この度、一般社団法人 日本建築学会※1が主催する「2025年度日本建築学会大会※2」において、国立研究開発法人 建築研究所(以下、建築研究所)と共同研究した「四足歩行ロボットによる被災建築物調査技術の開発」について成果発表を行いました。
本研究では、現実空間の被災建築物とロボットの挙動を仮想空間上で再現する「デジタルツイン技術」の開発と運用方法の検討を行い、災害時における安全かつ効率的な調査実現に向けた有効性を示しました。当日は、当社代表取締役社長の佐々木宣彦が登壇しました。
【研究の背景】
これまで、四足歩行ロボットを用いて災害後の被災建築物を想定した調査や、複数ロボットを連携させた運用技術の開発「四足歩行ロボット×デジタル技術の開発と災害時の活用検証」を建築研究所と進めてきました。
これらの取り組みは、危険区域に人が立ち入らずに調査を行える点で有効でしたが、一方で「ロボットの走行性・操作性・視認性の強化」や「操縦者の訓練」、「遠隔操作の高度化」といった課題が残されていました。
こうした背景を踏まえ、本研究では新たに“デジタルツイン”の仕組みを導入しました。現実の被災建築物とロボットの動作を仮想空間上に再現し、調査をシミュレーションできるシステムを構築することで、運用方法の標準化や効率的な訓練環境の実現を目指しました。
【論文発表の概要】
名 称:2025年度日本建築学会大会(https://taikai2025.aij.or.jp/)
部 門:材料施工8 建設ロボット
日 時:2025年9月10日(水) 9:52~10:40
会 場:国立大学法人九州大学 センターゾーン・ウエストゾーン センター2号館 2310室
論文名:「四足歩行ロボットによる被災建築物調査技術の開発 その4 デジタルツイン技術の開発と運用方法の検討」
英題:Development of technology for surveying the damaged buildings using a quadruped robot (Part 4: Development of Digital Twin Technology and Examination of Operational Methods)
発表者:佐々木宣彦(ポケット・クエリーズ)、宮内博之(建築研究所)
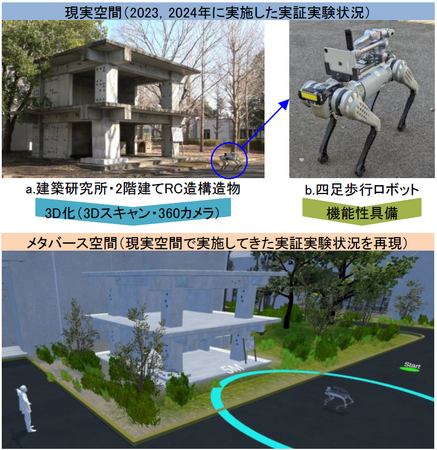
【VR-Robotについて】本研究では、現実空間の被災建築物を3Dスキャンで仮想空間上に再現し、遠隔操作カメラやセンサーを搭載した四足歩行ロボット(Unitree社製)を運用できる「VR-Robot」VRアプリケーションを開発しました。
これにより、デジタルツイン技術を活用した災害現場調査の可能性を示しています。
本発表では、このシステムを用いた実験的検討を通じて、将来的な災害調査の高度化に向けた可能性を示唆しました。
[画像1: https://prcdn.freetls.fastly.net/release_image/13422/39/13422-39-f5e8d0c4823517d3489cf1a42f26e393-740x763.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
四足歩行ロボットを活用した模擬被災建築物調査を再現した仮想空間
主な機能
- 現実空間の建築物を3D化し、仮想空間に再現
- ロボットには遠隔操作カメラ、距離センサー、傾斜センサー、ログ計測機能を搭載
- FPVゴーグルやコントローラーを通じて操縦可能
- 事前に設定した走行ルートに沿った自動走行(ライントレース)や対象物を自動追尾するカメラ機能を備え、効率的な調査が可能
【今後の展開と展望】
本成果により、仮想空間上でのロボット操作を通じ、被災建築物調査の安全性・効率性の向上が期待されます。ロボティクス技術は、今やAIと切り離せない関係にあります。
そして、そのAIを動かすために欠かせないのが、現実空間を正確に捉えるための3Dデータやデジタルツイン技術です。
当社では、創業当初より取り組んできたXRをはじめとする3D関連技術に加え、近年はロボティクスとAI分野にも注力してまいりました。
今回の取り組みは、これらの技術を融合させたソリューションをより一層推進するものであり、現場の課題解決に向けた新たな価値を提供するものと確信しています。
今後も、お客様企業の現場に深く寄り添い、テクノロジーによる実効的な貢献を目指してまいります。
[画像2: https://prcdn.freetls.fastly.net/release_image/13422/39/13422-39-ed73fe3a8564118433d88918de1bd639-145x167.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
株式会社ポケット・クエリーズ 代表取締役社長
佐々木 宣彦
新技術を社会に実装するには、コストや精度、運用面まで現場で使える形に仕上げる必要があり、その壁に何度もぶつかりました。特に、バーチャルとリアルの乖離をどう埋めるかは悩み続けた大きな課題です。何度も試しては修正し、失敗を繰り返しながら、少しずつ実務で使える手応えを掴めてきました。今回の成果が、現場で働く人々の安全や安心につながる一歩となれば、開発者としてこれ以上嬉しいことはありません。
1994年大学卒業、三菱ふそう(現)入社。製造業での機械設計エンジニアとしての経験を経て、富士通やITコンサルファームなどでシステム開発経験・ITコンサルティング経験を積む。2010年より現職(創業)。3Dを中心としたゲーム開発事業を経て、XR技術(VR/AR/MR)・IoT技術・AI技術などの最新技術を用いた建設・ライフインフラ業界のDX推進に関して日々研究開発・技術適用を進めている。
[画像3: https://prcdn.freetls.fastly.net/release_image/13422/39/13422-39-1332636c5000549da441a8fbf1459d02-145x178.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
国立研究開発法人建築研究所 上席研究員
宮内博之 氏
災害時の被災者支援や被災建物の調査に向けて、さまざまなロボット技術の活用が検討されています。なかでも四足歩行ロボットは、人が立ち入ることが難しい区域での活用が期待されています。さらにAI・XR・センサを融合し、人とロボットが連携することで、新たなチーム形成を実現する災害対策技術システムへと発展していく可能性を秘めています。私たちは、こうした技術の開発と提供を通じて、社会に貢献してまいります。
2003年に東京工業大学大学院・博士号(工学)を取得し、現在、国立研究開発法人建築研究所に所属。建築分野におけるドローンの社会実装に加え、空飛ぶクルマやロボット領域へ研究を展開している。東京理科大学及びお茶の水女子大学客員教授、国土交通省建築基準整備促進事業等のドローン関連委員、(一社)日本建築学会・ドローン技術活用小委員会主査、(一社)日本建築ドローン協会副会長を担当。
※1 1886年に創立された、建築に関する学術・技術・芸術の進歩発達を目的とする学術団体。会員数は約38,000名にのぼり、研究者・技術者・設計者など幅広い専門家が所属
※2 最新の建築に関する学術および技術情報を交換することを目的に毎年開催される国内最大規模の学術大会。発表題数は約6,000題に達し、建築学分野の最新研究が集まる場となっている
[画像4: https://prcdn.freetls.fastly.net/release_image/13422/39/13422-39-e90fbbabc1a82b1412d56145a14dbeea-351x107.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]株式会社ポケット・クエリーズ
ポケクエは第一線現場をお持ちのお客様が抱える『人財不足』をテーマに技能継承/省力化/多能工化を目的とした現場向けDXツールを多く開発。またこれらの領域に、生成AI技術を活用した技術検証・実運用を実現。
本 社 :東京都新宿区西新宿3-20-2 東京オペラシティタワー35F
代表者 :代表取締役社長 佐々木 宣彦
事業内容:ロボティクス/IoT事業,VR/AR/MRの実用アプリケーション開発,3D-CG事業
HP :https://www.pocket-queries.co.jp/




















{kind=link}
{kind=link}
{kind=link}
{kind=link}