


ソフトバンク傘下のアメリカ企業、ボストン・ダイナミクスが開発した人型ロボット、「Atlas」がバージョンアップ。驚異的な運動能力を動画で披露しています。なんとバック宙を難なくこなしてる!
「Atlas」はアメリカ国防総省の機関、DARPA(国防高等計画研究局)の支援を受けて、ロボット開発企業であるボストン・ダイナミクス社が製作した人型ロボットです。身長約150cm、重量約75kgで、主に捜索救出(SAR)用途に使用されることを目標に開発・熟成が進められているもの。動力源はバッテリーで、関節は油圧アクチュエータで駆動しています。





2017年11月16日に公開された動画では、連続して置かれた箱に飛び乗り、さらに次の箱へと飛び移ります。立体視できる2眼映像センサーとレーザーライダーで、次の箱までの距離を正確に把握し、さらにそこへ到達できる適切なパワーでアクチュエータを動かして飛んでいる訳です。さらに着地後、運動エネルギーをアクチュエータで減衰させて停止し、さらに2足姿勢を維持するようバランスをとる……ということを瞬時に行っています。
 |  |
さらに今度は、高さの違う箱の上に飛び乗ります。同じ高さの連続なら、固定の数値制御でも不可能ではありません。高さを変えても柔軟に対応できるというのは、飛び乗る高さをリアルタイムで測定し、それに合わせてアクチュエータの出力を調整して動かしている証拠です。
箱の上に飛び乗ったAtlasは、その場でジャンプしてクルッと180度方向転換。これは腰関節のひねりと腕の反動を利用して、ジャンプの瞬間に回転モーメントを与えています。そして着地後、腕を開いてモーメントを相殺し、バランスを保って静止しています。これはいわゆる『機動戦士ガンダム』の作品世界で、モビルスーツの宇宙空間での姿勢制御理論として設定されているAMBAC(Active Mass Balance Auto Control)そのもの。
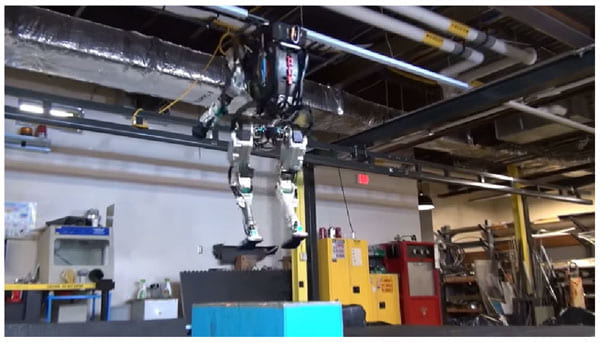
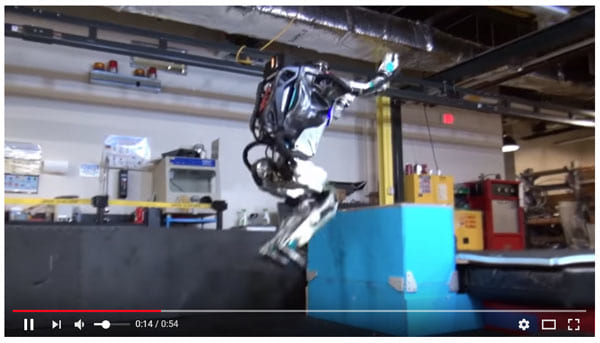
そして少し屈んだかと思うと、バック転!体操で言うところの「後方抱え込み宙返り」です。
 |  |
 |  |
スロー再生を見ると、やはりジャンプの後、脚部を振り子のように大きく降り出して回転モーメントを発生させ、その脚部を縮めたままにすることで回転半径を減らし、スピードアップ。1回転が終わるところで体を伸ばして回転速度を落として着地し、脚部のアクチュエータで着地の衝撃を吸収し、残りの回転モーメントを相殺して静止します。
これは体操選手の動きそのもの。お手本のような後方宙返りです。おそらく体操選手の体の使い方を、筋肉の動きを含めて徹底的に解析し、フォードバックしたんでしょうね。「人型ロボットを作ることは、人体を知ることにつながる」という話がよく解ります。
ただ、さすがにこれは今のところ、毎回できるという訳にはいかないようです。動画の最後にある「NG集」では、着地時に回転モーメントを相殺しきれずに後ろへと下がってしまったり、逆に前に飛び出して箱にぶつかり、転んでしまう姿も。この辺りも人間みたいですね。
ガンダムの理論を使ってバック宙するロボット……これは無重量状態の空間でも使える姿勢制御の方法なので、モビルスーツの時代がまた少し近づいた?
※画像は「What’s new, Atlas?」のスクリーンショットです。
(咲村珠樹)